l 機(jī)械臂作(zuò)為(wèi)載體(tǐ)為(wèi)制孔末端執行器(qì)提供制孔所需的(de)位置和(hé)姿态,但(dàn)是機(jī)械臂本身(shēn)的(de)絕對(duì)定位精度在不同的(de)位姿差别較大,一般在1mm~3mm,不能滿足飛(fēi)機(jī)制孔的(de)精度要求(±0.5mm)。
l 神工(gōng)科(kē)技(jì)針對(duì)這(zhè)一難題開(kāi)發出了基于軟件(jiàn)算(suàn)法的(de)“絕對(duì)定位精度動态補償技(jì)術”,并針對(duì)不同的(de)應用場(chǎng)景開(kāi)發了兩個(gè)系列的(de)補償算(suàn)法。以此提高(gāo)了機(jī)械臂的(de)絕對(duì)定位精度,達到±0.15mm的(de)水(shuǐ)平。
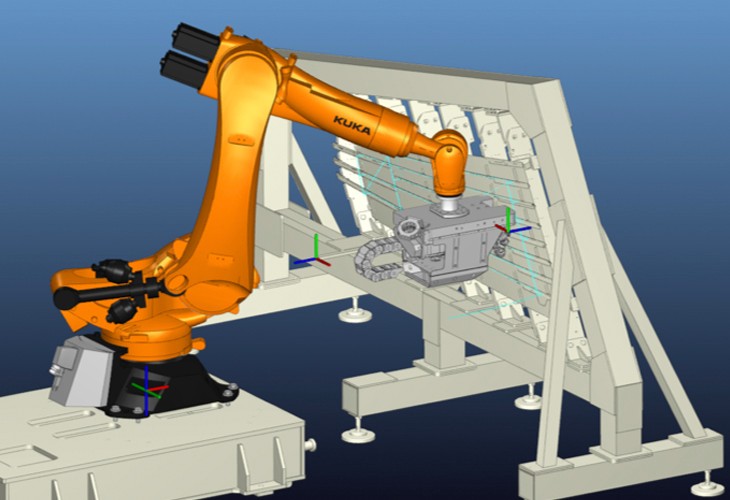
l 02機(jī)械臂絕對(duì)定位誤差補償算(suàn)法
l 機(jī)械臂作(zuò)為(wèi)載體(tǐ)為(wèi)制孔末端執行器(qì)提供制孔所需的(de)位置和(hé)姿态,但(dàn)是機(jī)械臂本身(shēn)的(de)絕對(duì)定位精度在不同的(de)位姿差别較大,一般在1mm~3mm,不能滿足飛(fēi)機(jī)制孔的(de)精度要求(±0.5mm)。
l 神工(gōng)科(kē)技(jì)針對(duì)這(zhè)一難題開(kāi)發出了基于軟件(jiàn)算(suàn)法的(de)“絕對(duì)定位精度動态補償技(jì)術”,并針對(duì)不同的(de)應用場(chǎng)景開(kāi)發了兩個(gè)系列的(de)補償算(suàn)法。以此提高(gāo)了機(jī)械臂的(de)絕對(duì)定位精度,達到±0.15mm的(de)水(shuǐ)平。